
A principios de este año, RED nos envió su cámara KOMODO-X para que la probáramos. No esperábamos una gran diferencia con la KOMODO existente que pusimos a prueba en nuestro laboratorio en enero de 2021. Pero ahora, finalmente ha llegado el momento de analizar la KOMODO X y, para nuestra sorpresa, hay algunos hallazgos interesantes. ¿Estás interesado en escuchar más al respecto? ¡Entonces sigue leyendo!
KOMODO-X 6K Digital Cinema Camera (Canon RF, Black)
all prices excluding sales tax/VAT
Como se mencionó anteriormente, probamos la cámara KOMODO 6K de primera generación en nuestro laboratorio. Mientras tanto, RED ha actualizado el sensor, el procesamiento de imágenes y el hardware de audio de la cámara, lo que condujo a un gran aumento en la velocidad de cuadros (por ejemplo, ahora son posibles 4K120 cuadros por segundo) y, según el sitio web de RED, también a un aumento en el rendimiento del rango dinámico.
Es hora de probar estas afirmaciones, ¿verdad?
Si no estás familiarizado con cómo probamos el rango dinámico, te sugiero que leas este artículo primero. Una vez más, quiero agradecer a mi querido colega Florian que me ayudó a realizarla.
Se trata de una cámara con obturador global, por lo que no hay prueba de rolling shutter ;-). Por lo tanto, comenzaremos con el rango dinámico.

Rango dinámico de la RED KOMODO-X a ISO800
Como ya hemos visto en las cámaras RED RAPTOR VV y RAPTOR-X, RED no proporciona un ISO “nativo” del sensor, y en REDCODE RAW el ISO se puede cambiar en la postproducción. Es por ello que utilizamos ISO800 como término medio para fotografiar nuestra tabla Xyla21 (la versión del firmware de la cámara es 1.1.1). Aquí hay un gráfico de forma de onda en 6K DCI R3D HQ para 25 cuadros por segundo. He ampliado las curvas RGB hacia 5600K usando el control deslizante de balance de blancos para usar un fenómeno específico de RED que se llama “recuperación de luces”, integrado de forma predeterminada en la ciencia del color IPP2 (REDWideGamutRGB, Log3G10):
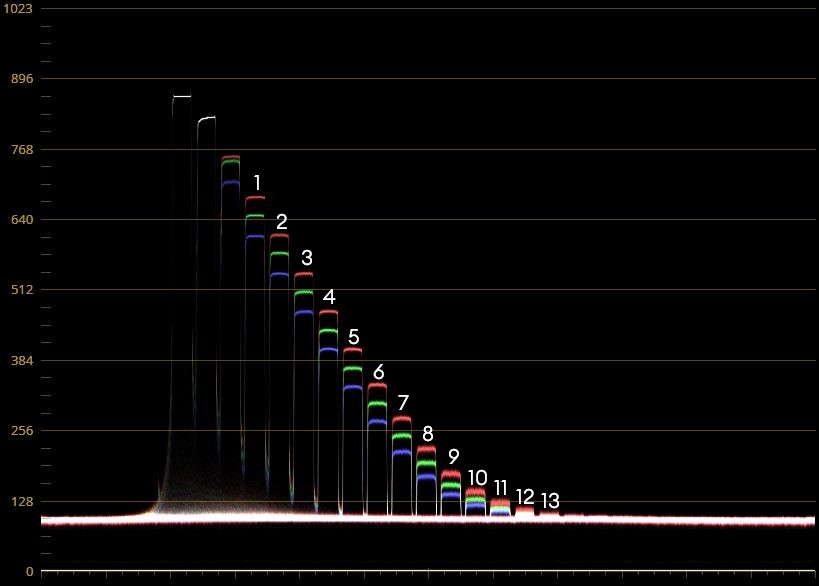
Se pueden identificar unas 13 paradas por encima del nivel de ruido. Sólo un recordatorio rápido: el rango dinámico es una proporción, no un número absoluto. Por lo tanto, si vamos desde el primer parche de la izquierda (que está completamente recortado), hay un segundo parche blanco que ha sido reconstruido por la “recuperación de luces” incorporada, pero esta parada no contiene ninguna información cromática, solo luma (no se pueden ver valores RGB individuales). Entonces, el primer parche que contiene información cromática es el tercer parche desde la izquierda, que es el primer parche en el que no se produce ningún recorte. Ahora, de este parche al siguiente (el 4º, de ahí la proporción del 3º al 4º) es nuestra primera parada, luego viene la siguiente parada, y así sucesivamente. Finalmente, llegamos a la última parada en la que aún sobresale un poco del ruido de fondo: alcanzamos las 13 paradas. Se puede ver una parada número 14 dentro del piso de ruido.
Esto parece aproximadamente 1 parada más de las que hallamos para la KOMODO 6K de primera generación.
Para todas las cámaras que hemos probado, siempre hemos empezado a contar desde la primera parada que tiene los tres canales RGB intactos. Verás más adelante en la sección de latitud que la zona reconstruida tiene información de color limitada, por lo que no la contamos como una parada “real”.
No me malinterpretes, la recuperación de luces es una herramienta útil, pero mi preferencia personal sería tenerla como una opción en la postproducción y no en el metraje (como es el caso de las cámaras Blackmagic que usan BRAW, por ejemplo).
Además, repetiré un dato que obtuvimos de RED con respecto al balance de blancos usando REDCODE RAW: los resultados de rango dinámico al tomar el gráfico Xyla son independientes de si el balance de blancos usado en la cámara fue correcto o ajustado en la postproducción. Les preguntamos a nuestros contactos en RED y la respuesta fue que “Los sistemas de cámara no utilizan ganancias de sensores analógicos discretos para diferentes balances de blancos para preservar la flexibilidad de los datos sin procesar del sensor. Para aclarar aún más, esto significa que funcionalmente al capturar un clip a 2800K y llevarlo a 5600K en la postproducción, se generará exactamente la misma imagen en comparación con si tuviera la cámara configurada en 5600K en el momento de la captura”.
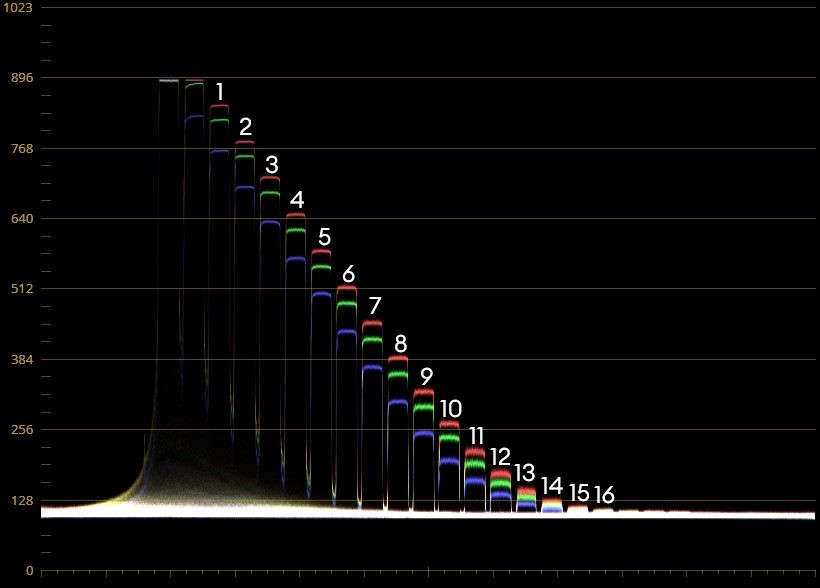
Algunos de ustedes han preguntado si, por ejemplo, ARRI también está utilizando la recuperación de luces para alcanzar sus altos valores de rango dinámico de referencia. La respuesta es “no”, a continuación se muestra un cuadro sobre cómo se ve la forma de onda RGB para la ARRI ALEXA 35 usando ARRIRAW en ISO800 (puedes ver nuestra prueba de laboratorio completa aquí) – no hay recuperación de luces:
Hasta ahora, todo bien. Ahora echémosle un vistazo a IMATEST:

IMATEST calcula 12.9 paradas con una relación señal-ruido (SNR) de 2 y 14.5 paradas con SNR = 1. IMATEST cuenta el parche recuperado, por lo que en lo que respecta a paradas utilizables con SNR = 2, diría que son aproximadamente 12.
Esto es 0.4 paradas mejor que la KOMODO 6K de primera generación, ¡es un resultado muy bueno!
Resultado de latitud para la RED KOMODO-X en R3D ISO800
La latitud es la capacidad de una cámara para retener detalles y colores cuando se sobreexpone o subexpone y se vuelve a la exposición base. Hace algún tiempo atrás, elegimos un valor arbitrario del 60% del valor de luma (en la forma de onda) para las caras de nuestros sujetos (en realidad, su frente) en nuestra escena de estudio estándar. Esta exposición base de CineD debería ayudar a nuestros lectores a obtener un punto de referencia para todas las cámaras probadas, independientemente de cómo se distribuyan los valores del código y qué modo LOG se utilice.
Nuevamente utilizamos 6K DCI 25fps R3D HQ en ISO800, nuestro Zeiss Compact Prime de confianza, y para su referencia aquí están las configuraciones en DaVinci Resolve 18.6.5:

Como ya hice anteriormente con la RAPTOR [X], probé dos formas de llevar los archivos R3D al espacio REC709:
a) Usando una transformación del espacio de color (CST) de R3D a la gama intermedia/amplia de DaVinci, ajustando la exposición y luego usando otro nodo CST para REC709 al final y b) simplemente agregando un nodo con un LUT (RWG_Log3G10_to_Rec709_BT1886_with_LOW_CONTRAST_and_r_3_Soft_size_33).
Como descubrí con la RAPTOR [X], al usar el CST en canales de subexposición masiva comenzó a recortarse a negro. No ocurre lo mismo con el enfoque LUT. Optamos por usar la opción b), y todos los ajustes de exposición se realizaron usando el control deslizante de exposición en la pestaña Camera Raw, así como los controles de elevación, gamma y ganancia en DVR (en el primer nodo, LUT en el último nodo).
Aquí está la exposición base, teniendo como modelo a mi querido colega Johnnie:

A partir de aquí, son posibles 2 paradas de sobreexposición antes de que la frente de Johnnie comience a recortarse, utilizando el sistema de exposición de semáforo basado en RAW de la KOMODO-X (quitando la hoja de papel blanca rápidamente):

Cuando llegamos a las 3 paradas, la frente de Johnnie está en el área de recuperación de luces, y comparando eso con la situación donde todos los canales de color están intactos, espero que ahora entiendas por qué no contamos la parada recuperada:

Ahora, a partir de la imagen a 2 paradas, comenzamos a subexponer cerrando primero el iris de nuestra lente CP2 y luego duplicando el valor del obturador.
El ruido comienza a aparecer a 5 paradas de subexposición, regresadas a la base:

No es nada grave ya que, si es necesario, la reducción de ruido puede solucionarlo fácilmente.
Pasemos a 6 paradas de subexposición. Nos encontramos a 8 paradas de latitud de exposición:

Ya estamos a 8 paradas de subexposición. Una parada más de lo que era capaz de alcanzar la KOMODO 6K de la generación anterior. Por supuesto, hay ruido por todas partes y se puede ver un fuerte matiz de color (rosa en las zonas más claras, verde en las zonas más oscuras). La reducción de ruido aún puede limpiar un poco la imagen, sin embargo, hay pequeños artefactos como líneas verticales que están comenzando a aparecer por todos lados, lo que marca que estamos en el límite.


Ahora veamos si podemos llevar esto a 9 paradas de latitud de exposición moviéndonos a 7 paradas de subexposición, regresando a la base:

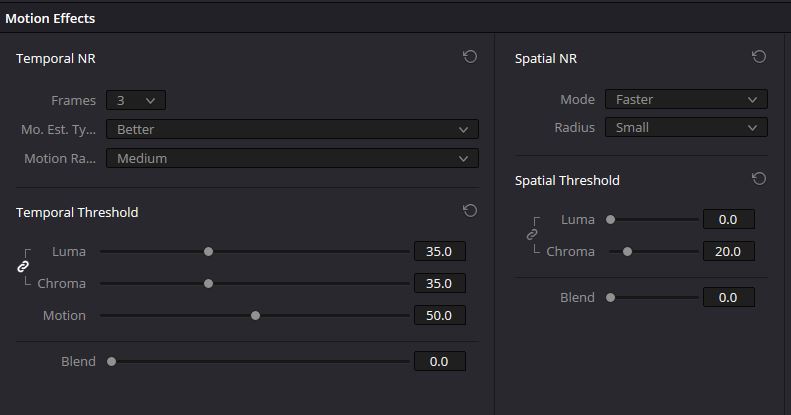
Como verás, aparecen parches más grandes de ruido cromático que me temo que la reducción de ruido no eliminará adecuadamente. Aquí hay una imagen con la reducción de ruido aplicada:


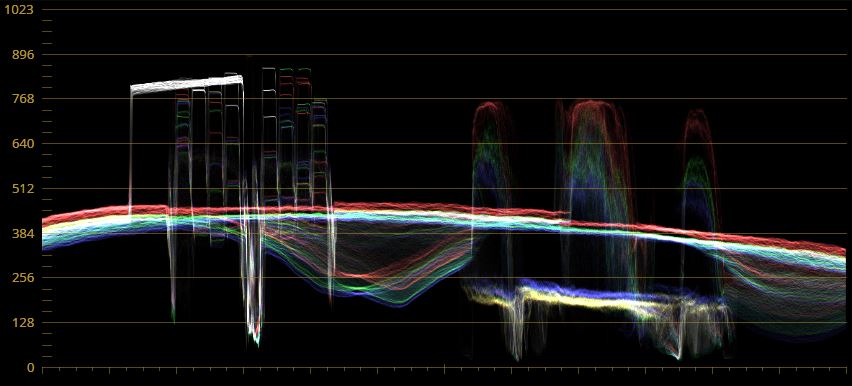
Como se puede ver en la forma de onda RGB, hay una fuerte tonalidad de color (también el lado oscuro de la cara de Johnnie se vuelve rosado), rayas verticales y parches más grandes de ruido cromático rosado que no se pueden eliminar. Aquí están las configuraciones de reducción de ruido correspondientes:
Podemos decir que llegamos al fin del juego cuando alcanzamos las 9 paradas de latitud de exposición, lo que da como resultado 8 paradas de latitud utilizables. Esto es una parada mejor que la KOMODO 6K.
A modo de referencia, la mejor cámara APS-C de consumidor hasta el momento es la FUJIFILM X-H2S (puedes ver nuestra prueba de laboratorio aquí), que muestra resultados similares a los de la KOMODO X en el departamento de rango dinámico y latitud, pero con un sensor rolling shutter.
El punto de referencia sigue siendo la ARRI ALEXA 35 con sensor APS-C, que exhibió aproximadamente 15 paradas de rango dinámico con SNR = 2 y 12 paradas de latitud de exposición; Estas son 3 o 4 paradas efectivas más.
Resumen
La evolución de la KOMODO-X gracias al nuevo sensor y procesamiento de imágenes está creando una cámara completamente nueva. Teniendo en cuenta que estamos hablando de un sensor APS-C 6K con obturador global, los resultados son bastante impresionantes en lo que respecta al rango dinámico y la latitud. Si a esto le sumamos un tamaño físico reducido, REDCODE RAW y precios atractivos, me siento tentado a comprar una para mí ;-)
En resumen, la KOMODO-X está aproximadamente a una parada de la cámara RAPTOR [X] full-frame, pero es una parada mejor que la KOMODO 6K de primera generación.
¿Has trabajado con la nueva RED KOMODO-X? ¿Cómo ha sido tu experiencia con ella hasta ahora? Cuéntanos en los comentarios a continuación.

![Prueba de Laboratorio de la RED V-RAPTOR [X] 8K VV - Rango dinámico y latitud de exposición](https://www.cined.com/content/uploads/2024/03/Thumbnail_2.1.1-370x230.jpg)
![RED Anuncia Versiones con Montura Z de Nikon de la V-RAPTOR [X] y la KOMODO-X](https://www.cined.com/content/uploads/2025/02/RED-V-RAPTOR-X-KOMODO-X-Z-Mount-featured-370x230.jpeg)








































