
今年初め、REDからKOMODO-Xカメラが送られてきた。2021年1月にラボでテストした既存のKOMODOとの違いはあまり期待していなかった。しかし、ついにKOMODO Xをテストする時が来た!
前述したように、我々は以前第一世代のKOMODO 6Kカメラをテストした。一方、REDはこのカメラのセンサー、画像処理、オーディオハードウェアをアップデートし、フレームレートを大幅に向上させた(例:4K120フレーム/秒が可能になった)。
これらの改善をテストすることになった。
ダイナミックレンジのテスト方法をご存じない方は、まずこの記事を読むことをお勧めする。また、このテストの撮影を手伝ってくれた親愛なる同僚Florianに改めて感謝したい。
このカメラはグローバルシャッターカメラなので、ローリングシャッターテストは行わない。) したがって、ダイナミックレンジから始めよう。

ISO800でのRED KOMODO-Xのダイナミックレンジ
RED RAPTOR VVと RAPTOR-Xカメラで先に見たように、REDはセンサーの「ネイティブ」ISOを提供しておらず、REDCODE RAWのISOはポストで変更できる。そこで、ISO800を中間値としてXyla21チャートを撮影した(カメラのファームウェアバージョンは1.1.1)。以下は、6K DCI R3D HQで25フレーム/秒の波形プロットだ。IPP2カラーサイエンス(REDWideGamutRGB、Log3G10)にデフォルトで組み込まれている 「ハイライトリカバリ 」と呼ばれるRED特有の現象を示すために、ホワイトバランススライダーを使ってRGBカーブを5600Kに向けて拡大した:
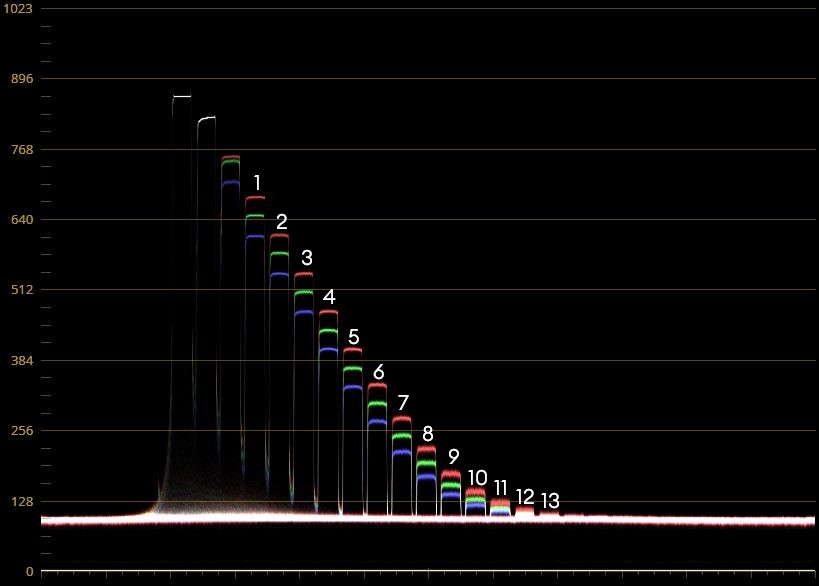
ノイズフロアの上に約13ストップが確認できる。ダイナミックレンジは比率であり、絶対値ではない。したがって、一番左の最初のパッチ(完全にクリップされている)から行くと、2番目の(白い)パッチがあり、これは内蔵の「ハイライトリカバリ」によって再構築されているが、このストップはクロマ情報を含まず、ルーマのみである(個々のRGB値が見えない)。したがって、クロマ情報を含む最初のパッチは左から3番目のパッチであり、これは何もクリップしない最初のパッチである。このパッチから次のパッチ(4番目、したがって3番目と4番目の比率)までの間が最初のストップであり、次に次のストップが来る。ノイズフロアからまだ多少はみ出している最後のストップ、13ストップに達するまで。14番目のストップもノイズフロアの内側に見える。
これは、我々がテストした初代KOMODO 6Kよりも約1段多いようだ。
これまでテストした全てのカメラで、我々は常に3つのRGBチャンネルが無傷である最初のストップから数え始めている。ラチチュードのセクションで後述するが、再構築されたパッチは色情報が限られているため、「本物の 」ストップとしてカウントしない。
誤解しないでほしいが、ハイライトのリカバリーは便利なツールだが、個人的な好みとしては、映像に焼き付けるのではなく(例えばBRAWを使ったBlackmagicカメラのケースのように)、ポスト処理でオプションとして使えるようにしたい。
また、REDCODE RAWを使用したホワイトバランスに関してREDから得た情報の一部を繰り返そう:Xylaチャートを撮影したときのダイナミックレンジの結果は、カメラで使用したホワイトバランスが正しいかポストで調整されたかに関係ない。REDに問い合わせたところ、答えはこうだった: 「カメラシステムは、生のセンサーデータからの柔軟性を維持するために、異なるホワイトバランスに対して個別のアナログセンサーゲインを使用していない。さらに明確にすると、これは機能的に何を意味するかというと、2800Kでクリップをキャプチャし、ポストで5600Kにすると、キャプチャ時にカメラを5600Kに設定した場合とまったく同じ画像がレンダリングされるということだ。
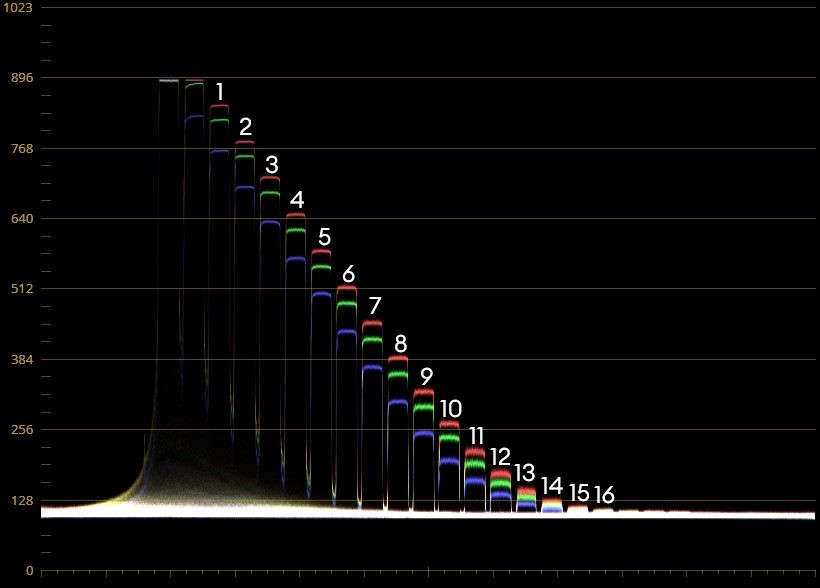
例えば、ARRIもハイライトリカバリーを使用して、ベンチマークとなる高いダイナミックレンジ値を達成しているのか、という質問があった。以下は、ARRI ALEXA 35をISO800でARRIRAWを使用した場合のRGB波形のチャートである(ラボテストはこちら:英語):
ここまでは順調だ。それではIMATESTを見てみよう:

IMATESTは、SNR=2で12.9ストップ、SNR=1で14.5ストップを計算する。IMATESTはもちろん再構築されたパッチをカウントするので、SNR = 2で使用可能なストップは約12ストップと言うことになる。
これは、初代KOMODO 6Kよりも0.4段優れており、非常に優れている!
RED KOMODO-XのR3D ISO800でのラティチュード結果
ラティテュードとは、露出オーバーまたは露出アンダーでベース露出に戻したときに、ディテールや色を保持するカメラの能力のことだ。少し前に、私たちは標準的なスタジオのシーンで、被写体の顔(実際には額)のルーマ値(波形で)60%という任意の値を選んだ。このCineDベース露出は、読者が、どのようにコード値を分配し、どのLOGモードを使用するかにかかわらず、テストしたすべてのカメラの基準点を得るのに役立つはずだ。
今回も6K DCI 25fps R3D HQ、ISO800、信頼のツァイス・コンパクト・プライムを使用した。参考までに、DaVinci Resolve 18.6.5での現像設定を以下に示す:

以前RAPTOR [X]で行ったように、R3DファイルをREC709空間にするために2つの方法を試した:
a)R3DからDaVinciの中間/広色域への色空間変換(CST)を使って露出を調整し、最後にREC709への別のCSTノードを使う方法と、
b)LUT(RWG_Log3G10_to_Rec709_BT1886_with_LOW_CONTRAST_and_r_3_Soft_size_33)ノードを追加する方法だ。
RAPTOR[X]を使ってわかったことだが、CSTを使って露出を大幅にアンダーにすると、チャンネルが黒くクリップし始めた。LUTのアプローチではそうならない。そこでb)を使用し、すべての露出調整はCamera Rawタブの露出スライダーとDVRのリフト、ガンマ、ゲインコントロール(最初のノード、LUTは最後のノード)を使って行った。
これが、ジョニーをモデルにしたベース露出だ:

ここから、KOMODO-XのRAWベースのトラフィックライト露出システム(白い紙を素早く取り除く)を使って、Johnnieの額がクリップし始める前に、2ストップの露出オーバーが可能だ:

3ストップオーバーでは、ジョニーの額はハイライトの回復範囲にある。すべてのカラーチャンネルが無傷の状況と比較すると、回復したストップをカウントしない理由がお分かりいただけたと思う:

次に、2ストップオーバーの画像から、まずCP2レンズのアイリスを閉じて露出アンダーにし、次にシャッター値を2倍にする。
露出アンダー5段でノイズが入り始め、ベースまで戻る:

必要であれば、ノイズリダクションで簡単にきれいにできる。
6ストップ露出アンダーにしよう。露出のラチチュードが8ストップになった:

すでに8ストップの露出アンダーになっている。前世代のKOMODO 6Kよりも1段多い。もちろん、ノイズはそこら中にあり、強い色かぶりが見られる(明るい部分はピンク、暗い部分は緑)。ノイズリダクションを使えばまだ多少はきれいになるが、縦線のようなわずかなアーチファクトが頭をもたげ始めている。


次に、露出アンダー7ストップをベースまで戻し、露出のラチチュードを9ストップまで押し上げることができるか見てみよう:

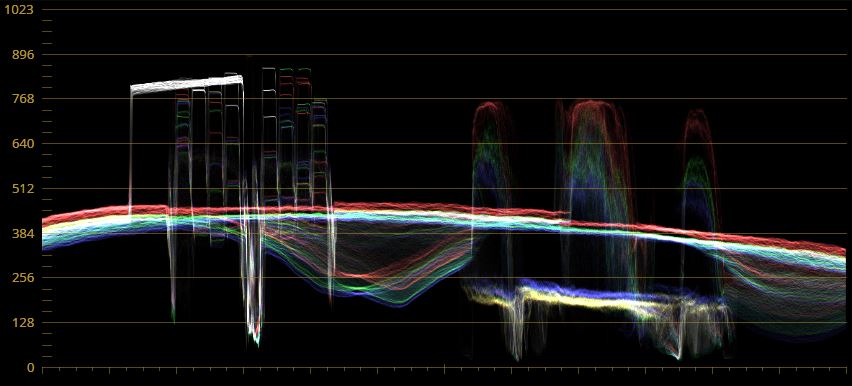
現在、より大きなクロマノイズのパッチが現れており、ノイズリダクションではうまくクリーンアップできないのではないかと心配している。これがノイズリダクションされた画像だ:


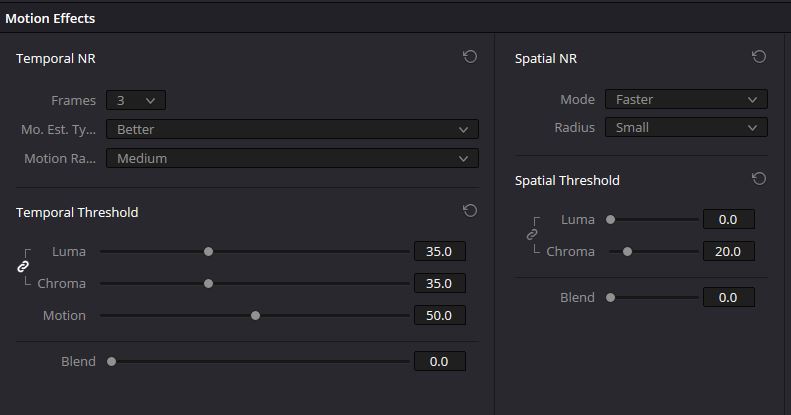
RGB波形を見るとわかるように、強い色かぶり(ジョニーの顔の暗部もピンクがかっている)、縦縞、除去できないピンククロマノイズの大きなパッチがある。以下に対応するノイズリダクションの設定を示す:
9ストップの露出ラティチュードでゲームオーバーとなり、8ストップのラティチュードが使えるようになった。これは、KOMODO 6Kよりも1ストップ優れている。
参考までに、これまでで最高の民生用APS-Cカメラは富士フイルムX-H2S(ラボテストはこちら)で、ダイナミックレンジとラチチュード部門でKOMODO Xと同様の結果を示しているが、こちらはローリングシャッターセンサーを搭載しての話だ。
ベンチマークは やはりAPS-CセンサーサイズのARRI ALEXA 35で、SNR=2で約15ストップのダイナミックレンジと12ストップの露出ラチチュードを示した。これは実質的に3~4段分多いことになる。
まとめ
新しいセンサーと画像処理を搭載したベビードラゴンのKOMODO-Xへの進化は、全く新しいカメラを生み出している。グローバルシャッターの6K APS-Cセンサーについて話していることを考慮すると、ダイナミックレンジとラチチュードの面で非常に印象的な結果が得られる。このカメラと、小さな設置面積、REDCODE RAW、魅力的な価格設定を組み合わせると、自分用に手に入れたくなる。)
まとめると、KOMODO-XはフルフレームカメラのRAPTOR [X]には1段足りないが、第1世代のKOMODO 6Kよりは1段優れている。
![RED V-RAPTOR [X] 8K VVラボテスト](https://www.cined.com/content/uploads/2024/03/Thumbnail_2.1.1-370x230.jpg)









































