
Earlier this year, RED sent us their KOMODO-X camera for us to test. We didn’t expect much of a difference from the existing KOMODO that we tested in our lab in January 2021. But now, the time has finally come to put the KOMODO X to the test, and to our surprise, there are some interesting findings! Interested in hearing more? Then just keep reading!
KOMODO-X 6K Digital Cinema Camera (Canon RF, Black)
all prices excluding sales tax/VAT
As mentioned above we tested the first generation KOMODO 6K camera in our lab here. Meanwhile RED has updated the sensor, image processing, and audio hardware of this camera which led to a big increase in framerates (e.g. 4K120 frames per second are now possible) and according to RED’s website, also to an increase in dynamic range performance.
Time to test these claims, right?
If you are not familiar with how we test dynamic range, I suggest reading this article first. Also, again I want to thank my dear colleague Florian who helped me shoot this test.
This is a global shutter camera, so no rolling shutter test here ;-). Hence we start with the dynamic range.

Dynamic Range of the RED KOMODO-X at ISO800
As we have seen earlier on the RED RAPTOR VV and RAPTOR-X cameras, RED does not provide a “native” ISO of the sensor, and in REDCODE RAW ISO can be changed in post. So we used ISO800 as the middle ground to shoot our Xyla21 chart (camera firmware version is 1.1.1). Here is a waveform plot at 6K DCI R3D HQ for 25 frames per second. I have expanded the RGB curves towards 5600K using the white balance slider to demonstrate a RED-specific phenomenon, which is called “highlight recovery”, built as default into the IPP2 color science (REDWideGamutRGB, Log3G10):
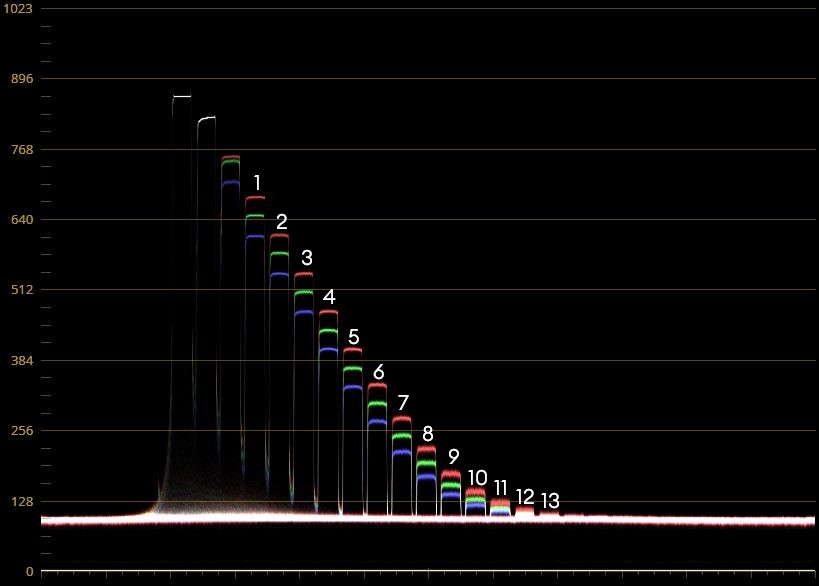
About 13 stops can be identified above the noise floor. Just a quick reminder, dynamic range is a ratio, not an absolute number. Hence, if we go from the very left first patch (which is completely clipped), there is a second (white) patch – which has been reconstructed by the built-in “highlight recovery”, but this stop does not contain any chroma information, only luma (no individual RGB values can be seen). Therefore, the first patch containing chroma information is the 3rd patch from the left – this is the first patch where nothing clips. Now from this patch to the next (the 4th, hence the ratio of the 3rd to the 4th) is our first stop, then comes the next stop, and so on. Until we have reached the last stop that still somewhat sticks out of the noise floor – 13 stops. Even a 14th stop can be seen inside the noise floor.
This looks like about 1 stop more than we tested for the first-generation KOMODO 6K.
For all the cameras we have tested so far we have always started to count from the first stop that has all three RGB channels intact. You will see later in the latitude section that the reconstructed patch has limited color information, so we don’t count it as a “real” stop.
Don’t get me wrong, highlight recovery is a useful tool but my personal preference would be to have it as an option in post, and not baked in the footage (like it is the case for the Blackmagic cameras using BRAW for example).
Also, I will repeat a piece of information that we got from RED regarding the white balance using REDCODE RAW: results for dynamic range when shooting the Xyla chart are independent of whether the white balance used in camera was correct or adjusted in post. We asked our contacts at RED, and the answer was: “The camera systems do not use discreet analog sensor gains for different white balances in order to preserve flexibility from the raw sensor data. To further clarify, what this means functionally is that capturing a clip at 2800K, and bringing it to 5600K in post will render the exact same image compared to if you had the camera set to 5600K at the time of capture.”
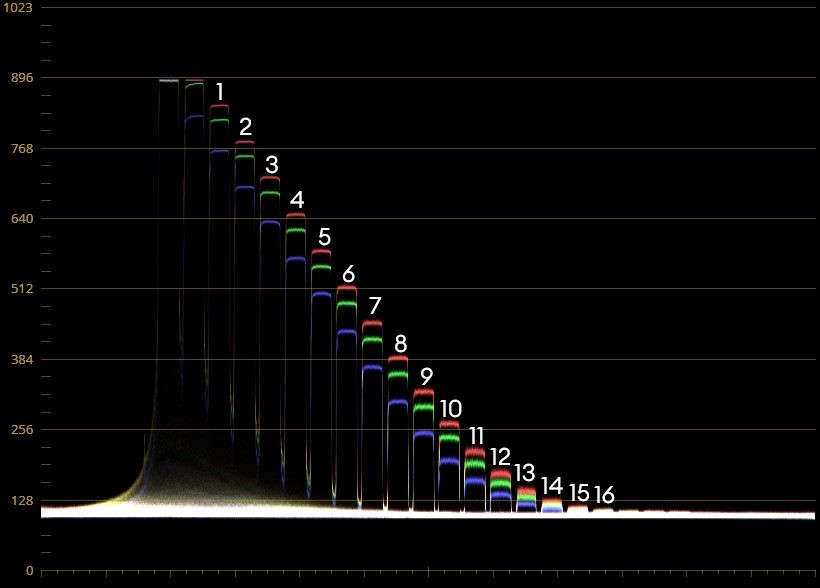
Some of you have asked if, for example, ARRI is also using highlight recovery to achieve their high, benchmark dynamic range values. The answer is “no”, below is a chart on how the RGB waveform looks for the ARRI ALEXA 35 using ARRIRAW at ISO800 (full Lab Test here) – no highlight reconstruction at work:
So far, so good. Now let’s have a look at IMATEST:

IMATEST calculates 12.9 stops at a signal-to-noise ratio (SNR) of 2 and 14.5 stops at SNR = 1. IMATEST will of course count the reconstructed patch, so for usable stops at SNR = 2 I would say it’s about 12 stops.
This is 0.4 stops better than the first-generation KOMODO 6K – very good!
Latitude result for the RED KOMODO-X in R3D ISO800
Latitude is the capability of a camera to retain details and colors when over- or underexposed and pushed back to base exposure. Some time ago, we chose an arbitrary value of 60% luma value (in the waveform) for our subjects’ faces (actually their forehead) in our standard studio scene. This CineD base exposure should help our readers get a reference point for all the cameras tested, regardless of how they distribute the code values and which LOG mode is used.
Again we used 6K DCI 25fps R3D HQ at ISO800, our trusted Zeiss Compact Prime, and for your reference here are the development settings in DaVinci Resolve 18.6.5:

As I previously already did with the RAPTOR [X], I tried two ways to bring the R3D files to the REC709 space:
a) by using a Color Space Transform (CST) from R3D to DaVinci intermediate/wide gamut, adjusting exposure, and then using another CST node to REC709 at the end and b) just adding a node with a LUT (RWG_Log3G10_to_Rec709_BT1886_with_LOW_CONTRAST_and_r_3_Soft_size_33).
As I found with the RAPTOR [X], using the CST at massive underexposure channels started to clip to black. Not so with the LUT approach. So b) was used, and all exposure adjustments were done using the exposure slider in the Camera Raw tab as well as the lift, gamma and gain controls in DVR (on the first node, LUT on the last node).
Here is the base exposure, having my dear colleague Johnnie as a model:

From here, 2 stops of overexposure are possible before Johnnie’s forehead starts to clip, using the RAW-based traffic light exposure system of the KOMODO-X (removing the white sheet of paper quickly):

At 3 stops over, Johnnie’s forehead is in the area of the highlight recovery – and comparing that to the situation where all color channels are intact, I hope you now understand why we do not count the recovered stop:

Now, from the 2 stops over image, we start to underexpose by closing the iris of our CP2 lens first and then doubling the shutter value.
Noise starts to kick – in at 5 stops underexposure, brought back to base:

Nothing serious – if needed, noise reduction can easily clean this up.
Let’s move to 6 stops underexposure. We are now at 8 stops of exposure latitude:

We are already at 8 stops of underexposure. One stop more than the previous generation KOMODO 6K was capable of. Of course, noise is all around the place and a strong color cast can be seen (pink in the lighter areas, green in the darker areas). Noise reduction can still clean this up somewhat, however, slight artifacts like vertical lines are starting to raise their ugly head – definitely borderline.


Now let’s see if we can push this to 9 stops of exposure latitude by moving to 7 stops of underexposure, pushed back to base:

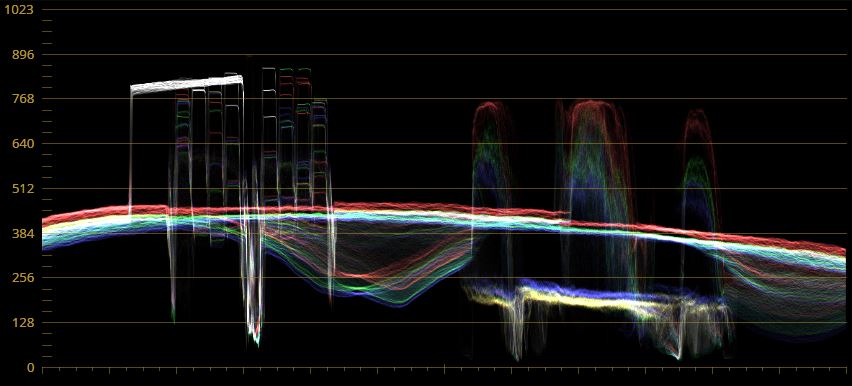
Now, larger patches of chroma noise are appearing which I am afraid noise reduction will not clean up properly. Here is a noise-reduced image:


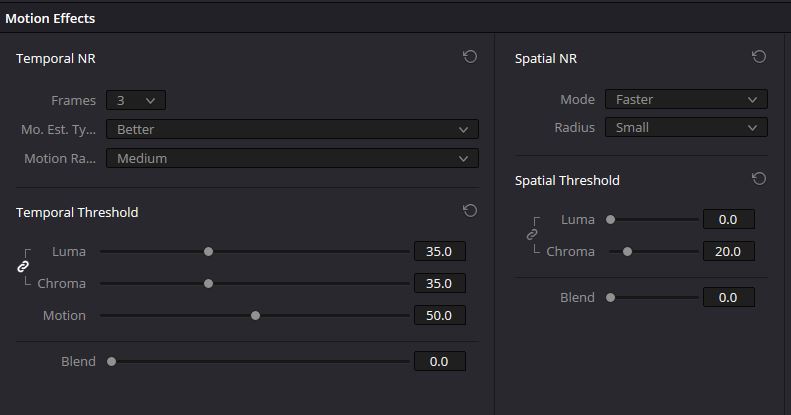
As can be seen in the RGB waveform, there is a strong color cast (also the dark side of Johnnie’s face turns pinkish), vertical stripes, and larger patches of pink chroma noise are there which cannot be removed. Here are the corresponding noise reduction settings:
Game over at 9 stops of exposure latitude, leading us to usable 8 stops of latitude. That’s one stop better than the KOMODO 6K.
For the sake of reference, the best consumer APS-C camera so far is the FUJIFILM X-H2S (Lab Test here) which exhibits similar results to the KOMODO X in the dynamic range and latitude department, but with a rolling shutter sensor.
The benchmark is still the APS-C sensor-sized ARRI ALEXA 35 which exhibited about 15 stops of dynamic range at SNR = 2 and 12 stops of exposure latitude. That’s an effective 3 to 4 stops more.
Summary
The evolution of the baby dragon with a new sensor and image processing into the KOMODO-X is creating a completely new camera. Considering that we are talking about a global shutter 6K APS-C sensor we get quite impressive results on the dynamic range and latitude front. Pair that with a small physical footprint, REDCODE RAW, and attractive pricing, I am tempted to go and get one for myself ;-)
In summary, the KOMODO-X falls about one stop short of the full-frame RAPTOR [X] camera but is about one stop better than the first gen KOMODO 6K.
Have you shot with the new RED KOMODO-X camera? What are your experiences so far? Let us know in the comments below.

![RED V-RAPTOR [X] 8K VV Lab Test - Dynamic Range and Exposure Latitude](https://www.cined.com/content/uploads/2024/03/Thumbnail_2.1.1-370x230.jpg)




























